Настало время рассмотреть процесс создания цепей коррекции для канала регулирования напряжения.
На рисунке ниже представлена соответствующая
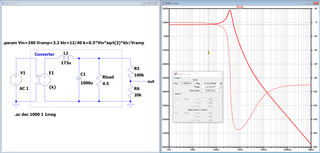
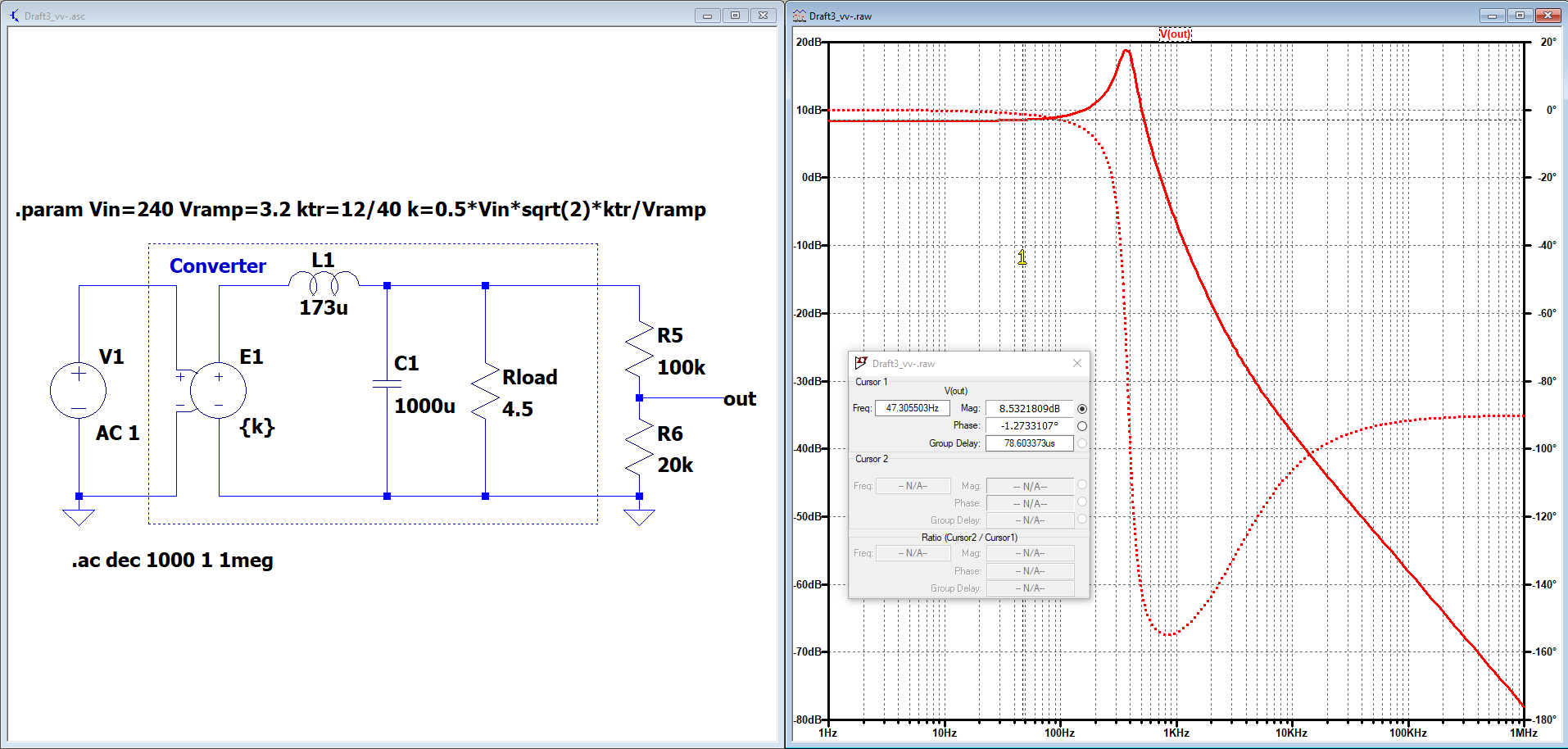
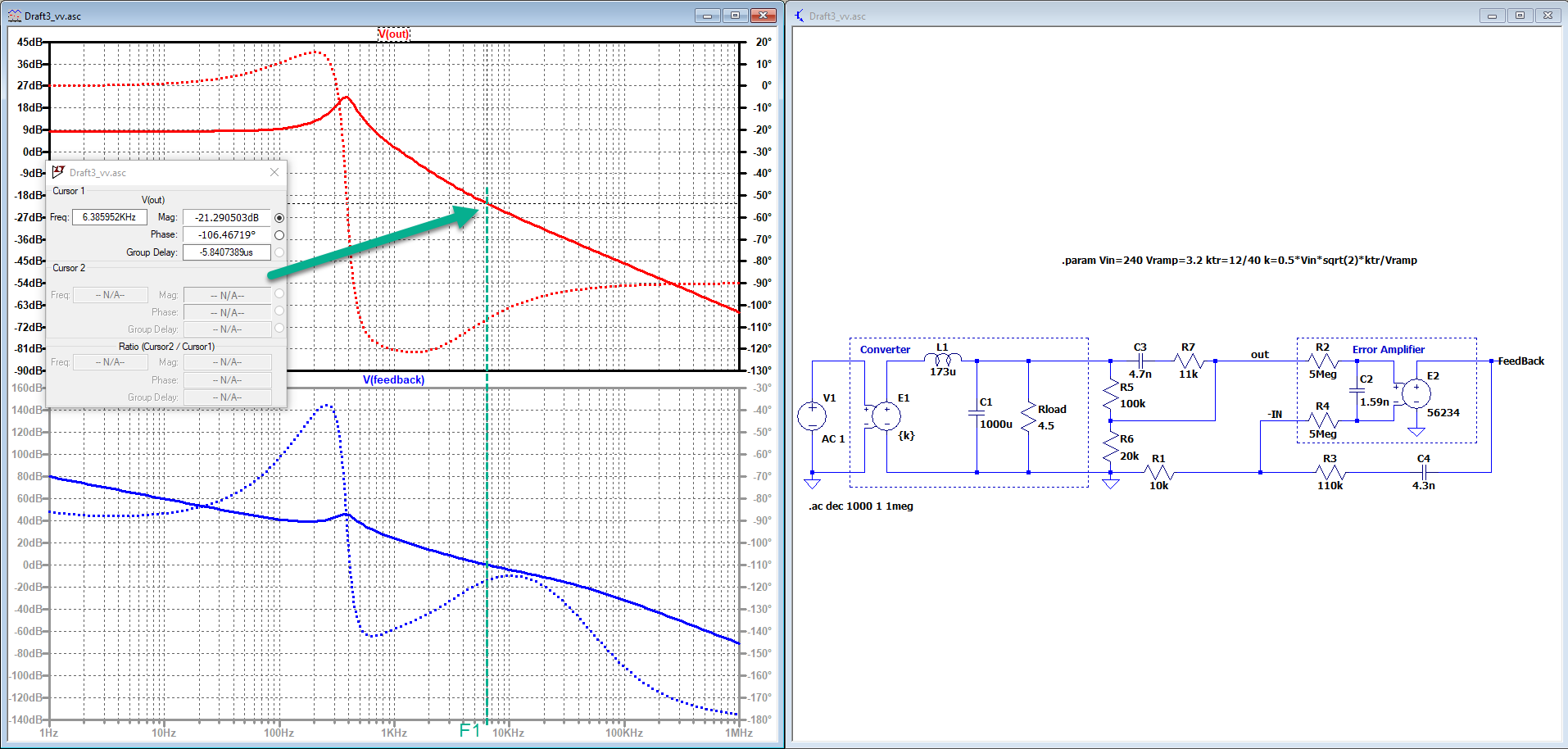
малосигнальная модель преобразователя, работающего в режиме CCM, для канала "управления-выход".
По большому счету эта модель не сильно отличается от подобной модели для режима регулировки тока. Отличие заключается в том, что выходной сигнал
out снимается с резистивного делителя напряжения R5,R6. Величина нагрузочного резистора Rload соответствует работе при максимальном выходном напряжении 30 В и максимальной выходной мощности 200 Вт. Так же как и в случае с регулировкой тока, здесь исследуется самая "высокая" ЛАЧХ, соответствующая максимальному напряжению сети Vin.rms = 240 В.
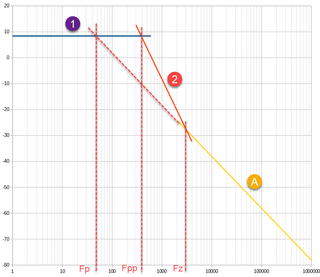
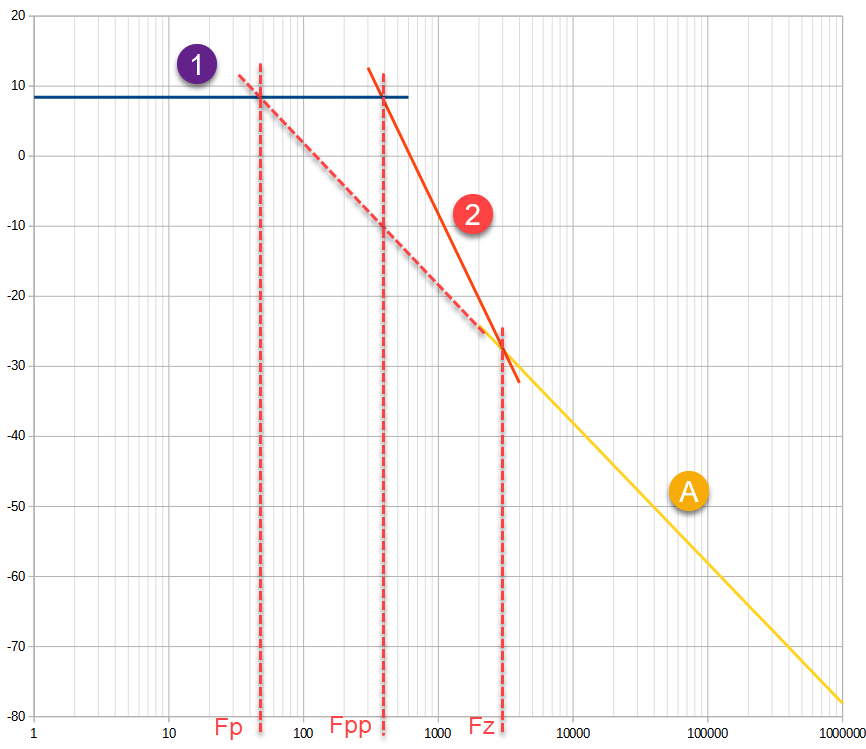
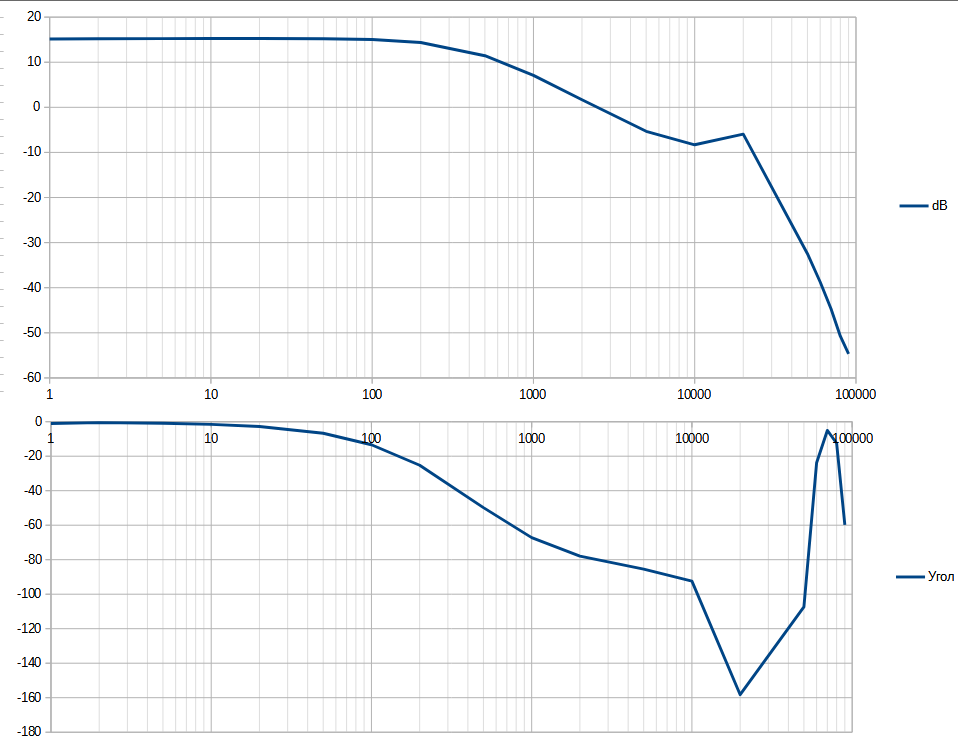
ЛАЧХ имеет три выраженных участка:
1. Горизонтальный низкочастотный участок с уровне 8.4 дБ;
2. Среднечастотный участок, имеющий наклон -40 дБ/дек.;
3. Высокочастотный участок, имеющий наклон -20 дБ/дек.
Примечание: В данном месте стоит заметить, что практически все реально существующие ЛАЧХ могут аппроксимироваться линиями, имеющими нулевой наклон (0 дБ/дек), а также линиями, имеющими наклон кратный 20 дБ/дек (20, 40, 60 ...).
Частота, в которой наклон увеличивается (становиться более отрицательным), называется частотой полюса, а частота в которой происходит обратный процесс, называется частотой нуля.
Зачастую ЛАЧХ схемы можно рассчитать. Порассуждаем, как это можно сделать для нашей схемы.
Очевидно, на очень низких частотах, реактивные компоненты L1,C1 не оказывают какого-то влияния и поэтому там ЛАЧХ имеет горизонтальный вид. Её уровень определяется коэффициентом передачи
k ИНУН, а также коэффициентом передачи двух делителей напряжения. Первый делитель, имеющий коэффициент передачи Kd, образуется внутренним сопротивлением R дросселя L1 и сопротивлением нагрузки Rload. Второй делитель напряжения, имеющий коэффициент передачи Kr, образуется резисторами R5,R6. Значения этих коэффициентов можно найти по следующим формулам:
K = Vin.rms * sqrt(2) * N2 / (2 * N1 * Vramp) = 240 * sqrt(2) * 12 / (2 * 40 * 3.2) = 15.91Где:
Vin.rms - действующее значение сетевого напряжения;
Vramp - размах (p-p) пилообразного напряжения на ножке CT контроллера TL494;
N1 - количество витков первичной обмотки трансформатора;
N2 - тоже для вторичной обмотки трансформатора.
Kd = Rload / (Rload + R) = Kd = 4.5 / (4.5 + 0.035) = 0.99Kr = R6 / (R5 + R6) = 20 / (100 + 20) = 0.1667Общий коэффициент передачи на низкой частоте определяется по формуле:
K(дБ) = 20 log (K * Kd * Kr) = 20 log (15.91 * 0.99 * 0.1667) = 8.4 дБГоризонтальный участок простирается вплоть до частоты Fpp (двойной полюс), которая является частотой резонанса контура L1,C1:
Fpp = 1 / (2 * pi * sqrt(L1 * C1)) = 1 / (2 * pi * sqrt(0.000173 * 0.001)) = 382.6 ГцПосле Fpp ЛАЧХ заваливается с наклоном -40 дБ/дек.
Этот наклон продолжается до частоты нуля Fz, где реактивное сопротивление конденсатора C1 становится равным его внутреннему сопротивлению Resr. Частоту Fz можно найти по формуле:
Fz = 1 / (2 * pi * Resr * C) = 1 / (2 * pi * 0.052 * 0.001) = 3096 Гц После этой частоты, наклон ЛАЧХ уменьшается до -20 дБ/дек.
Моделирование подтверждает расчеты с высокой точностью. В принципе, с расчетами можно не заморачиваться, а сразу ориентироваться на результаты моделирования. Преимущество расчетов в том. что они позволяют получить точные значения.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}